EV2Gym-Driveway: Semi-Centralized EV Charging with Reinforcement Learning
March – May 2025
TLDR
- Built a realistic EV travel dataset from the NHTS to model household driving patterns across the U.S.
- Developed EV2Gym-Driveway, a custom OpenAI Gymnasium simulator modeling neighborhoods where each home owns one EV.
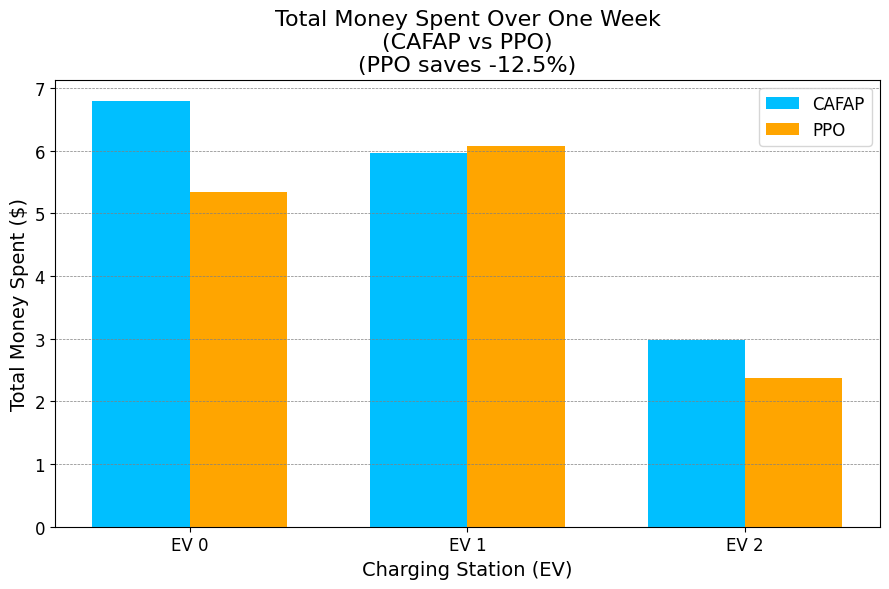
- Trained PPO and DQN agents to coordinate charging and discharging, reducing peak grid load and cost compared to a naive “charge immediately” baseline — with PPO achieving a 12.5% cost reduction when coordinating 3 vehicles.
Project Overview
As electric vehicles (EVs) become more common, their potential as distributed energy storage is gaining attention. This project explores how EVs parked in home driveways can be coordinated using reinforcement learning to lower electricity costs and reduce stress on the grid.
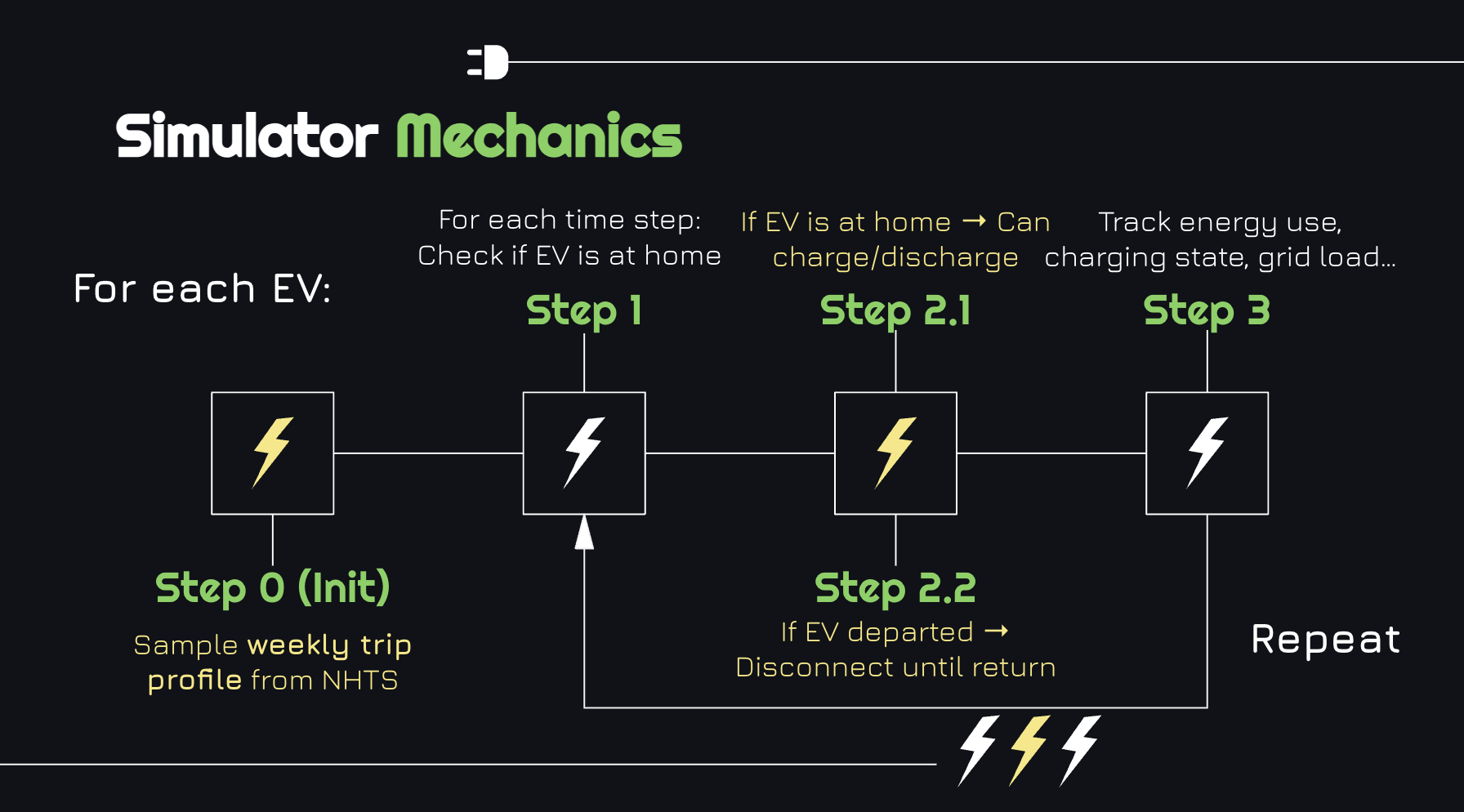
We built a custom simulation environment — EV2Gym-Driveway — to model a realistic neighborhood setting where each EV is assigned a daily travel pattern. Our goal was to develop a reinforcement learning system that intelligently schedules charging and discharging under real-world constraints.
We trained both a Proximal Policy Optimization (PPO) agent and a Deep Q-Network (DQN), comparing them against a naive Charge As Fast As Possible (CAFAP) baseline. PPO and DQN both succeeded at reducing peak grid load and cost — but primarily at small coordination group sizes. As group size increased, performance became unstable, highlighting the challenges of reward shaping, hyperparameter tuning, and scalable coordination under semi-centralized control.
Can reinforcement learning coordinate neighborhood EVs to reduce grid stress and cost — without requiring full centralization?
Full Report and Code
Results: Reducing Charging Cost
What I Learned
- Open AI's Gymnasium framework is incredibly powerful, and satisfying to build with.
- Even strong RL methods like PPO can struggle to scale without careful reward shaping and tuning.
- Semi-centralized coordination for EV charging may offer a promising middle ground between performance and privacy.
This project was completed as part of COMS 6998: Machine Learning and Climate, a graduate-level course taught by Professor Alp Kucukelbir at Columbia University. I worked alongside David Wu on this project. The simulator used was a modified version of the EV2Gym environment originally developed by Stavros Orfanoudakis et al. in their 2025 paper,“EV2Gym: A Flexible V2G Simulator for EV Smart Charging Research and Benchmarking.”